Automotive megatrends such as autonomous driving and ADAS are challenging designers to convert from traditional ECUs(1) to DCUs (2) and to further accelerate CCU(3) /ZDU(4) adoption. According to the McKinsey Center for Future Mobility (5), the next generation of EE architecture using zonal computing has started and expects a CAGR of around 44-45% between 2023-2030. The DCU usage will increase to $44M value during the same timeline.
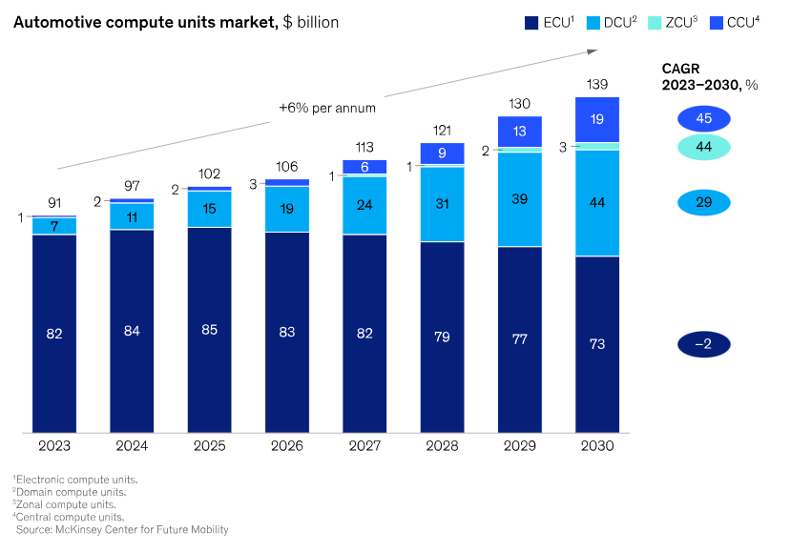
Figure 1 – Automotive Compute Units Market ($Mio USD)
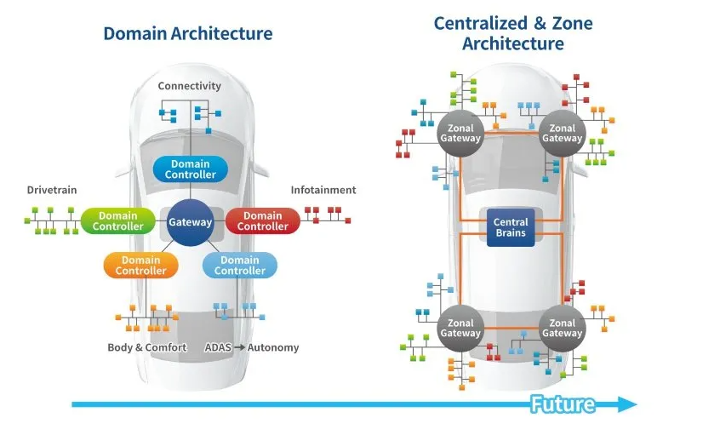
Figure 2 – EE Architecture Evolution ECU -> DCU -> ZCU/CCU
The typical domain-based electrical architecture that dedicates a control unit for each functional system is giving way to a zonal approach (6); this evolution is fundamentally driven by 4 factors (5,6):
In recent years, autonomous electrical vehicle development has gained significant attention from researchers and engineers.(7) Many changes are revolutionizing the automotive EE architecture, leading to autonomous driving and the associated challenges. An autonomous vehicle must be capable of sensing the environment and safely navigating without human input.(8) The US NHTSA has defined 5 different levels of autonomy (9).
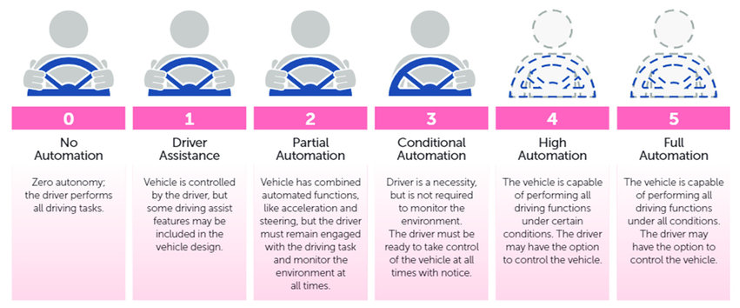
Figure 3 – Levels of Autonomous Driving by NHTSA (US Department of Transportation’s National Highway Traffic Safety Administration)
On the higher autonomy levels, the vehicles must sense their surroundings using multiple sensors, such as LiDAR, Cameras, GPS, etc. Based on the sensor inputs, the vehicles must locate themselves in real time, make decisions, and act on driving. The abbreviation ADAS stands for advanced driver-assistance systems. The sensors aim to improve driving safety and are called Sensing. On the other hand, the abbreviation AD refers to autonomous driving, in which the AD system processes the data from sensing, making decisions, and command orders to actuators (brake, steering, etc…) is named Cognitive (‘brain’ with ability to process sensing data, perception and decision), as presented on figure 4 and 5.
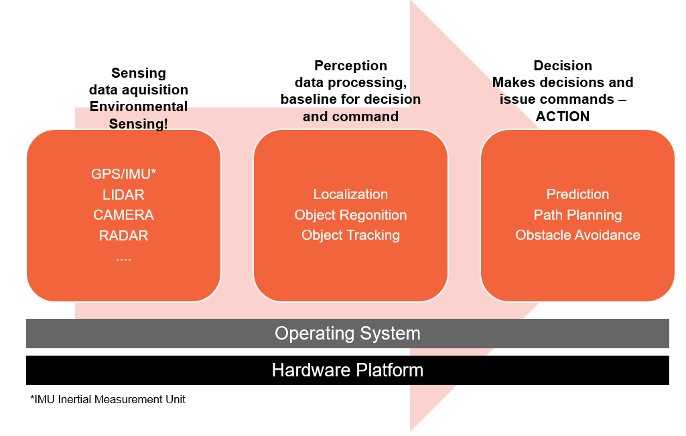
Figure 4 – Tasks in Autonomous Driving: 3 main stages: Sensing -> Perception and Decision
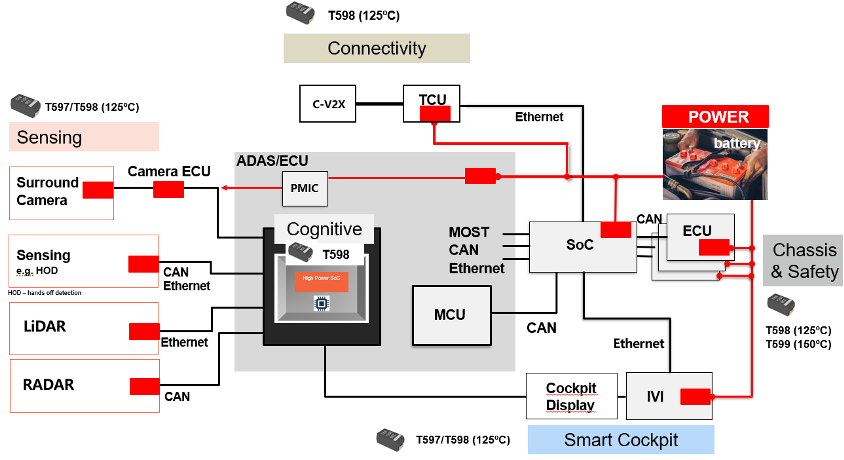
Figure 5 – Automotive Placement Strategy with Polymer Capacitors
The computing systems for AD can be divided into computation, communication, storage, security/privacy, and power management. (10)
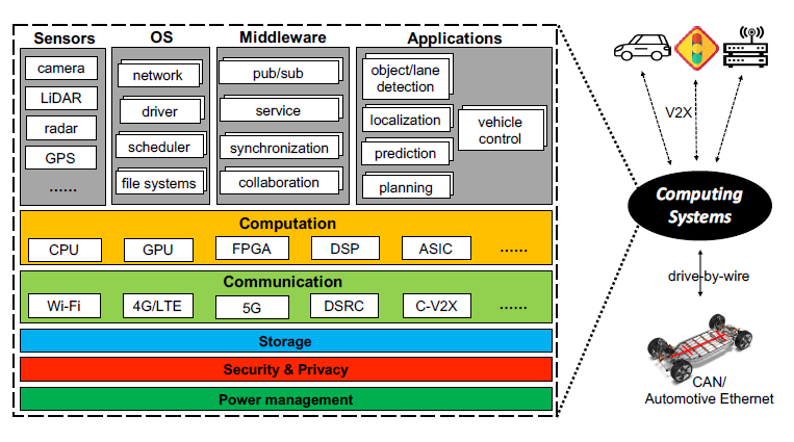
Figure 6 – Schematic EE AD Computing System
The continuous effort to increase the autonomy level significantly enhances computing system capabilities for AD. According to Liangkai et al. (10), today's “state-of-the-art” computing systems for AD include 7 performance metrics, 9 key technologies, and 11 open challenges.
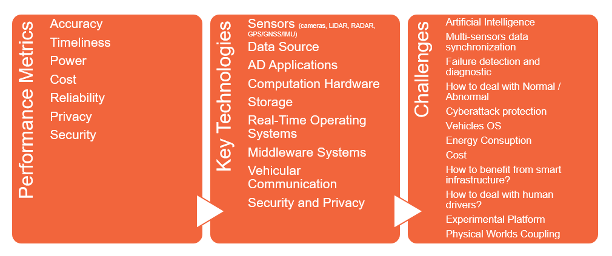
Figure 7 – AD Computing Systems State of the Art and Challenges
As the level of autonomous driving increases, the number of sensors installed must increase accordingly to acquire data on the surrounding environment. As the number of sensors increases, the amount of data processed by SoC increases, and the power consumption of the main semiconductor device that performs data processing increases. This evolution increases power consumption to optimize the cognitive 'brain' capability.
Inside a DCU schematic exists (a) a transceiver circuit that communicates with sensing ECUs, (b) an SoC (System on a Chip) that processes data and makes decisions, (c) various memories (DDR/Flash), (d) a microcontroller MCU that controls driving based on the information assessed by the SoC, and (e) DC/DC converter power supply circuits to operate the various functions with different voltage rails (<1V, 3.3V, 5V etc.).
The SoC with low voltage, lower 1V, and typically > 25A, on the DCUs/ZCU/CCUs requires components capable of: "high current," "low loss," "miniaturization," "high-frequency operation," and "high accuracy (voltage)."
It is common for DC/DC converter to use T598 polymer capacitors for noise reduction at the input and smoothing/decoupling at the output, typically the T598D476M025ATE060 (EIA 7343-31 47uF25V, 60mOhm) has been adopted at the input and the T598D477M2R5ATE006 (EIA 7343-31 470uF2,5V, 6mOhm) has been successfully designed at output smoothing/decoupling. To further advance future needs, KEMET now has prototype samples available for the next generation of input noise reduction, with the T598D107M025ATE050 (EIA 7343-31 100uF25V, 50mOhm) and capacitance extension T598D687M2R5ATE006 (EIA 7343-31 680uF2,5V, 6mOhm) for optimum output smoothing.
The demand increase in power consumption to support higher processing data and action will continue to require the T598 Series' main advantages: high capacitance combined with low capacitance roll-off in frequency and temperature stability, low ESR and high ripple performance, and extended life span performance.
Conclusion
The T598 Polymer Automotive Grade offers solutions to designers where space board saving, high volumetric efficiency/miniaturization, and reliability are required. Please contact a sales representative to support you in your actual challenge designing DCU/ZCU/CCU applications!
References
(1) ECU https://en.wikipedia.org/wiki/Electronic_control_unit
(2) DCU https://autotech.news/autonomous-driving-and-cockpit-domain-control-unit/
(3,4) ZCU/CCU https://www.continental-automotive.com/en/solutions/server-zone-architecture/zone-control-units.html
(5) Market Information - McKinsey Center for Future Mobility
(6) EE Architecture Evolution (https://www.eetasia.com/the-role-of-centralized-storage-in-the-emerging-zonal-automotive-architecture/)
(7) 'Overview analysis of recent development of Self-Driving Electrical Vehicles,' Qasim Ajao and Landre Saqeeq Georgia Southern University
(8) ‘CAAD: Computer Architecture for Autonomous Driving', Shaoshan Liu, Jie Tang, Zhe Zhang and Jean-Luc Gaudiot, IEEE
(9) Policy of Automated Vehicles, NHTSA
(10) ‘Computing Systems for Autonomous Driving: State-of-the-art and Challenges’, Liangkai Liu, et al.