Keeping a reasonable ‘social distance’ from industrial robots, particularly the high-speed ones used in car manufacturing, is nothing new. However, the recent pandemic is likely to spur an increase in the adoption of more robotic equipment, such as collaborative robots (cobots) as well as mobile robots, such as autonomous guided vehicles (AGVs), to help lower the number of people in the workplace as well as facilitate better social distancing for those who remain.
While automating industrial processes raises productivity, there are challenges associated with the coexistence of this profusion of electrical systems. Robotic equipment designers need to be ultra-conscious of electromagnetic compatibility (EMC) design criteria to ensure functional safety systems provide the desired protection.
Electromagnetic interference (EMI) can cause a variety of robot malfunctions, such as system restarts, unexpected robot movement, or even possibly affecting the functional-safety systems. The consequences of the false triggering of the safety mechanism can potentially lead to unplanned equipment stoppages during repair, causing lost production time – along with the associated costs of this. Worse still is the potential for human injury if the robot fails to stop when triggered.
Worker safety is of paramount importance – whether interacting directly with a robot or working in its vicinity. The EU Machinery Directive 2006/42/EC defines safety requirements, and for wireless technologies, there is the Radio Equipment Directive (RED). ISO 10218-1:2011 covers inherent safe design and protective measures for industrial robots, while ISO 10218-2:2011 covers their design, installation, operation, and maintenance.
The utilization of robots brings additional safety challenges. With no guards or screens to protect workers, other protection mechanisms are required – such as the implementation of proximity sensors to detect human presence and halt the robot operation. There are also ‘design safe’ methodologies to keep in mind, for example eliminating sharp edges or covering parts of a machine where deformable materials are present. The ISO/TS 15066 standard covers collaborative industrial robots specifically and supplements the ISO 10218 standards. But one thing that is missing from both of these is the effect that EMI has on robotic equipment. The IEC/TS 61000-1-2 and IEC 61326-3-1 standards specifically address EMC requirements concerning functional safety, along with the IEC 61000-6-2 (immunity) and 61000-6-4 (emission) EMC standards for electrical and electronic equipment used in industrial environments.
With so many standards to navigate, designing industrial robotics can be a minefield. So, what are the key factors that need to be at the forefront of any designer’s mind?
In a nutshell – a combination of capacitors and inductors (chokes) will filter out the noise and reduce conducted EMI below levels needed to comply with EMC standards. Of course, it isn’t as simple as this. Sometimes, additional shielding is necessary to ensure immunity to radiated interference from external sources and prevent emitted radiation from subsystems on the robot.
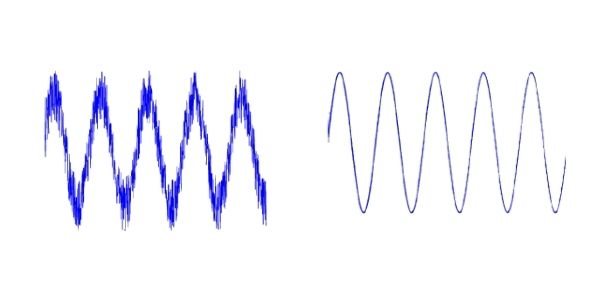
Figure 1. Line voltage signal without (left) and with (right) X- and Y- filter capacitors.
X-capacitors in across-the-line (phase to phase or phase to neutral) locations protect against differential mode interference. Whereas Y-capacitors are connected from phase-to-ground and filter out common-mode noise, as shown in figure 2.
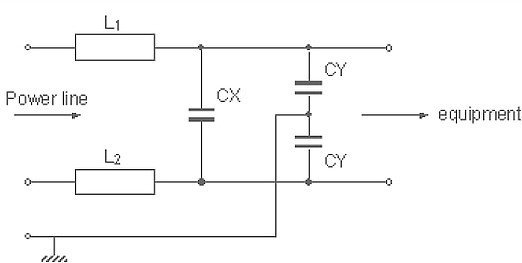
Figure 2. X- and Y-capacitor connection.
For robotic automation systems, X- and Y-capacitors need to withstand applied voltages significantly above the nominal supply voltage. They must also handle high temperatures and maintain stable characteristics over the full operating range.
Metalized polypropylene film capacitors, such as the F862-V054 X2 capacitors and R41T Y capacitors, are ideal for these applications. They are relatively low cost, and their self-healing properties ensure the maintenance of capacitance over an extended period. Both devices also meet AEC–Q200 requirements for automotive qualification – so they are ideal for reliable operation harsh environmental conditions. The R41T series is particularly well suited for use in Y2 and X1’ line-to-ground’ and ‘across-the-line’ connections in situations where the capacitor’s failure could lead to the danger of an electric shock.
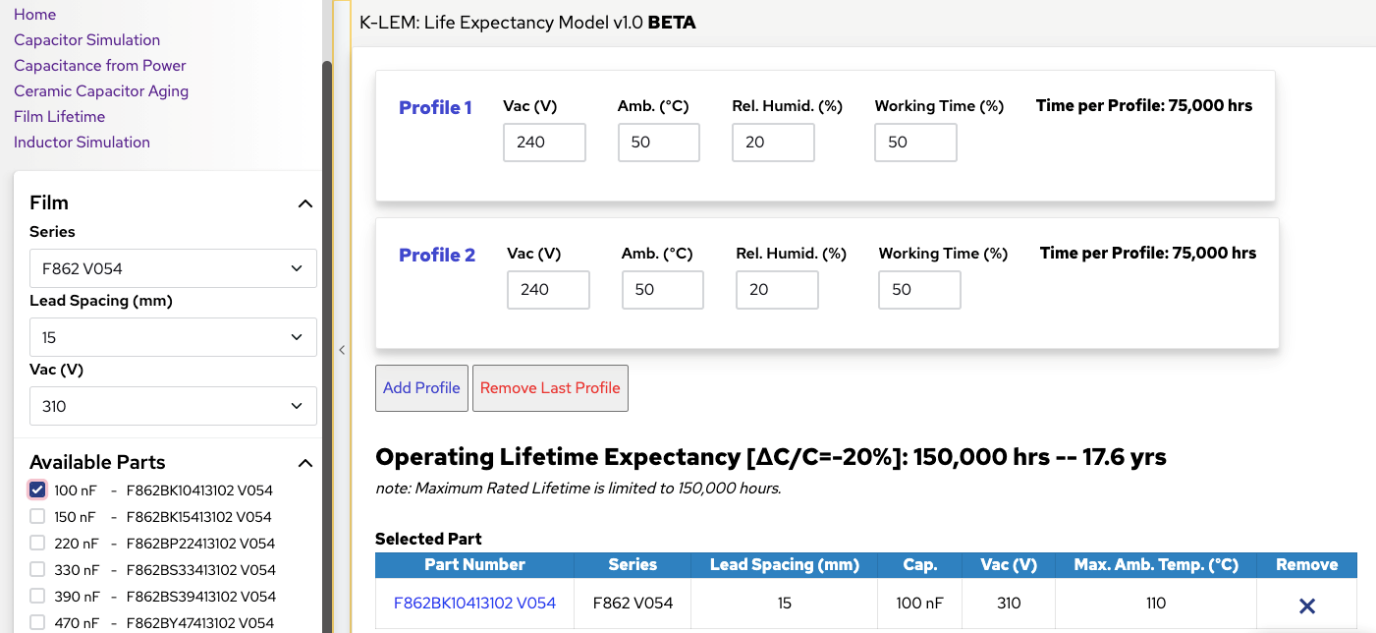
Figure 3. KEMET’s Life Expectancy Model (K-LEM) calculator offers lifetime predictions for film capacitors under varying THB conditions.
Another challenge faced by engineers is calculating the life expectancy of a capacitor under certain conditions. Using a datasheets only this can be difficult to do and is compounded further when considering temperature, humidity, and bias (THB). As a result, we developed the film-life calculator, K-LEM (figure 3). K-LEM is an online tool that enables engineers to ensure functional safety systems in robotic automation equipment helping engineers design next-gen solutions that meet stringent standards.